In April of this year, there was a collapse at a parking garage in Manhattan. The rescuers faced a dilemma as they didn’t want to risk their safety by staying in the unstable structure. To overcome this challenge, they came up with a brilliant solution: they utilized both flying drones and a robot that walked like a dog. These high-tech tools were deployed to assess the damage, search for any survivors, and ensure that the area was secure enough for human rescuers to enter. This innovative approach not only protected the rescuers from further danger but also allowed for a thorough examination of the site.
New York Mayor Eric Adams praised the effectiveness of the robot dogs, even in a situation where one of them toppled over while traversing a debris-filled area, gaining viral attention online. Instead of seeing this mishap as a failure, Adams regarded it as a testament to the success of these robots. He emphasized that the robotic canines played a crucial role in ensuring no survivors were missed during rescue missions, thereby providing additional safety measures for human rescuers.
In the near future, rescuers might rely on advanced robotic search-and-rescue teams that are capable of navigating challenging terrains. Researchers are currently working on creating a collaboration between flying, walking, and rolling robots, enabling them to collectively explore areas that would be impossible for a single robot to handle. Moreover, these robots will possess communication skills, allowing them to interact with each other and make independent decisions without constant guidance from humans. This development will revolutionize the effectiveness and efficiency of rescue missions, enhancing the capabilities of rescuers in reaching out to those in need.
In tricky situations, teams of robots like these could prove invaluable in tackling challenging environments such as caves or mines. These places can be a real nightmare for rescue teams, making it difficult to locate and reach survivors in need. Similar to collapsed buildings in cities or underground areas like subways or utility tunnels, there are often dangerous sections that human rescuers cannot enter without being aware of potential risks.
Robots face significant challenges when attempting to operate in certain environments. These areas are filled with challenges such as mud, rock, and rubble. Additionally, these locations can have constrained passages and large open areas. The range and complexity of these surroundings make it difficult for robots to navigate effectively. Viktor Orekhov, a roboticist and technical advisor to the Defense Advanced Research Projects Agency (DARPA), which sponsors research in this field, acknowledges the numerous mobility challenges that robots encounter in these demanding environments.
Underground areas present a challenge due to their lack of light and potential for dust or smoke, particularly in the aftermath of a disaster. Additionally, the presence of rock and debris can disrupt radio communications, leading to a loss of contact between robots and their human operators as they venture further into these environments. These circumstances pose a heightened level of difficulty and uncertainty, requiring effective strategies to be employed. This means that exploration in underground spaces can be both perplexing and unpredictable, making it essential to find innovative solutions that guarantee success despite these obstacles.
According to Orekhov, who worked on a comprehensive review published in the 2023 Annual Review of Control, Robotics, and Autonomous Systems, roboticists have faced numerous challenges. However, they have managed to make significant advancements in their field. Despite the perplexing nature of their work, they have continuously pushed the boundaries and achieved success. Orekhov’s research showcases the burstiness of their efforts, highlighting their determination and dedication to making robots more efficient and autonomous. These findings present an optimistic outlook for the future of robotics, showing that even in the face of difficulties, progress can be made.
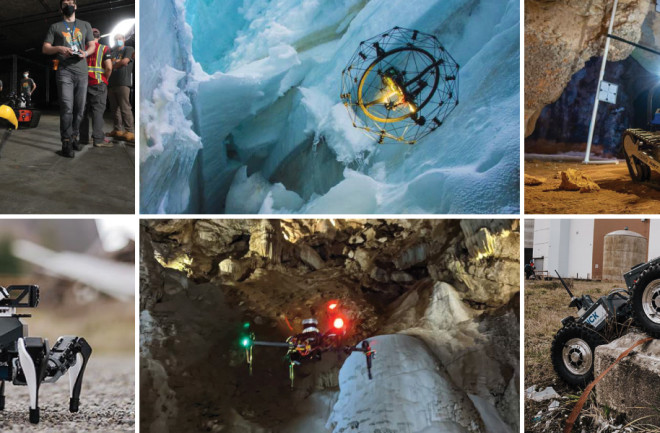
We can explore a promising approach by utilizing a diverse array of robots, incorporating a meld of treads, wheels, rotors, and legs, to effectively maneuver through various environments. Each robot type possesses distinct advantages and limitations. For instance, wheeled or treaded robots have the capability to transport substantial loads, boasting ample battery power for extended operation periods. Walking robots excel in conquering stairs and maneuvering over unstable debris with finesse. On the other hand, flying robots showcase their proficiency in swiftly mapping out expansive areas. By employing this strategic combination, we can optimize the strengths of each robot type to tackle different spaces effectively.
In the world of advanced technology, there are fascinating robots that have the ability to transport other robots. These incredible flying robots, although impressive in their capabilities, often have limited battery lives. This is where the concept of “marsupials” comes into play. These marsupial robots, equipped with wheels, treads, or legs, act as carriers for the flying robots, transporting them to remote and unexplored areas. Once they reach a vast expanse that requires mapping or investigation, the marsupial robots release their aerial counterparts. This innovative approach ensures that the flying robots can conserve their energy while still effectively exploring and mapping the designated terrain.
The brainiacs at the US government’s Defense Advanced Research Projects Agency (DARPA) threw down the gauntlet to robotic gurus, urging them to concoct squads of bots capable of delving deep into intricate underground mazes. Setting a fine example is the sprightly legged robot belonging to the triumphant team, deftly investigating a tunneled domain. By strutting on its sturdy legs, this dexterous machine effortlessly traverses even the roughest of landscapes.
When it comes to exploring unknown territories, having a team of robots can be incredibly beneficial. Think of it like having a group of individuals, each with their own set of skills and tools. Some robots might come equipped with lights, while others may have radar, sonar, or thermal imaging capabilities. This diverse range of instruments enables the robots to see clearly even in challenging conditions, be it low light or dusty environments. As these robots work in tandem, they continuously gather data and create an ever-expanding map of the space they are exploring. This collaborative effort between humans and robots proves invaluable for gaining a deeper understanding of unknown territories.
When it comes to enhancing overall mobility, teams of robots are definitely beneficial. However, there is a new challenge that arises with these teams. It can be quite challenging for a human controller to effectively coordinate them, especially in underground settings where radio signals are hindered by thick walls.
Imagine a scenario where robots are exploring deep areas underground or underwater. These robots face the challenge of losing radio contact with the surface, leaving them disconnected from their controllers and other robots. However, there’s a clever solution to tackle this problem – allowing robots to talk to each other. By enabling communication between robots, a robot that has ventured further into the depths can transmit messages through other robots that still have contact with the surface. Furthermore, robots can enhance their communication range by strategically dropping portable radio relays along their path, which act as “bread crumbs”. These relays serve as a bridge, ensuring better connectivity with the controller and other robots. With this interconnected system, robots can effectively navigate through challenging environments while maintaining constant contact with their fellow machines and human operators.
When one person is tasked with operating multiple robots simultaneously, they can easily become overwhelmed. However, researchers are currently finding solutions to this issue by developing robots that have the ability to work together autonomously. This means that even in situations where communication may be limited, the robots can collaborate effectively without the need for constant human intervention.
In 2017, a thrilling and groundbreaking project was initiated by DARPA, aiming to revolutionize robotics by exploring the depths below the surface. The challenge involved talented engineers from universities and technology companies who joined forces to create innovative technologies for robots to navigate underground environments. Their goal? To not only map but also navigate through intricate subterranean spaces with speed and utmost efficiency. The possibilities were endless, and the participants were ready to conquer the unknown depths.
According to Orekhov, the teams that excelled in this challenge were the ones that allowed the robots to have a degree of independence. When the robots were disconnected from both each other and their human operator, they had the ability to venture out on their own and explore for a specific period of time. Afterward, they would reconnect through radio signals and share the information they had gathered.
The team at Australia’s CSIRO, led by roboticist Navinda Kottege, has gone beyond the norm by creating robots that work together to make decisions. These impressive machines have the power to determine which tasks to focus on, whether it’s mapping a room, exploring a corridor, or setting up a communications node in a specific location. Instead of being controlled by humans, the robots have the autonomy to choose their own path. It’s a fascinating development that showcases the ingenuity of robotic intelligence.
The clever robots collaborated to efficiently divide the tasks among themselves. If a sleek, rolling robot encountered a tight passageway that was inaccessible, a compact walking robot would step in to handle the job. When one robot needed to send data to the central hub, it would simply transfer it to a nearby robot, which would then make its way back to a spot where communication was possible. These robotic buddies knew how to coordinate and optimize their efforts seamlessly.
Kottege describes witnessing a fascinating display of emergent behaviors among robots. It was intriguing to observe how these robots autonomously exchanged tasks with one another, motivated by certain influencing factors.
You know, it’s funny how sometimes humans can actually be the ones who mess things up. I mean, there was this one time when a super smart robot made by CSIRO was being tested. The robot was supposed to explore this new area, but it wouldn’t go into a corridor it came across. Turns out, there was a steep slope in that corridor that the robot knew it couldn’t handle, but the human in charge didn’t. So, in order to keep going, the human took control and steered the robot through. It was like a surprise roller coaster for the robot! But hey, you live and you learn, right? In this case, the robot knew better than the human operator.
According to Kottege, the drone had quite an unexpected turn of events. It performed a backflip, but unfortunately, in the midst of this acrobatic maneuver, it unintentionally squashed the drone on its own back.
In order to fix this issue, the team developed a control system that allows the human operator to determine the overall strategy. The operator can prioritize certain parts of the course and then rely on the robots to make the detailed decisions on how to achieve the desired outcomes. This approach is distinct from the traditional method of controlling the robots using a joystick. Instead, the human operator can simply mark an area on the map, designating it as a high priority zone that the robots need to explore. This new system empowers the human operator to guide the robots effectively without the need for manual control.
According to Kostas Alexis, a roboticist at the Norwegian University of Science and Technology, the concept of an autonomous team in robotics was a revolutionary breakthrough. Alexis’s team, which ended up winning the challenge, successfully demonstrated the idea of controlling a group of robots entirely through autonomous means, with minimal input from a human operator. This novel approach had never been attempted before and marked a significant milestone in the field. The team achieved this by giving high-level commands to the robots, allowing them to operate independently and efficiently. The innovative nature of this approach not only brought about excitement but also raised questions about the possibilities of what else can be achieved in the realm of robotics.
In an ideal scenario, imagine if these cool underground robots could venture out and explore on their own without any help! How awesome would that be? Picture this – even if they encounter rocks or other stuff that blocks radio signals, these robots would still be able to carry on with their mission! This incredible video demonstrates how these robots can venture into unfamiliar territories, map them out, and navigate through them without any trouble. Just a heads up, though – the video has some flashy lights, so be prepared!
According to Orekhov, there are still challenges to overcome. For instance, during the competition, many robots experienced breakdowns or got stuck and had to be removed from the course once the competition ended. Within just an hour, most teams only had one or two robots that were still operational. However, as robots continue to improve, it is possible that teams of robots could one day enter dangerous disaster areas, locate survivors, and provide updates to their human operators with minimal guidance. Orekhov acknowledges that there is still much work to be done, but he also recognizes the rapid advancements that have been made by the teams. Even with their present capabilities, these robots are already making a significant impact in real-life scenarios.
10.1146/knowable-072023-2